Terry Allen


Professional Summary
Terry Allen is a groundbreaking transportation systems engineer specializing in control strategies for ultra-high-speed vacuum tube maglev (hyperloop) networks. With expertise in electromagnetic dynamics, distributed control systems, and vacuum infrastructure, Terry pioneers algorithms to ensure stability, safety, and energy efficiency in next-generation near-vacuum transportation systems. His work addresses the core challenges of maintaining millimeter-level vehicle positioning at 1,000+ km/h speeds while minimizing energy losses and operational risks.
Core Innovations & Technical Leadership
1. Adaptive Electromagnetic Control
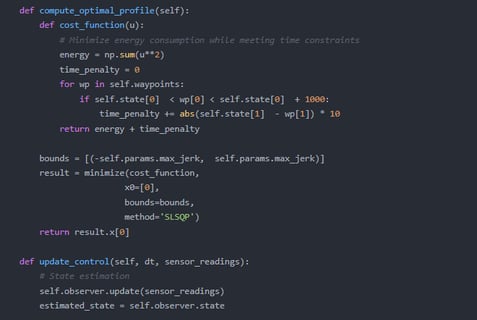
Designs multi-agent control systems that synchronize:
Levitation control: Active damping for vibration suppression under 0.1atm pressure
Propulsion tuning: Switching reluctance motor optimization for 10G acceleration/deceleration
Guidance correction: Sub-5mm lateral deviation via LQR (Linear-Quadratic Regulator) methods
2. Extreme Environment Resilience
Develops fault-tolerant protocols for:
Partial vacuum breaches: Dynamic pressure compensation algorithms
Power fluctuations: Supercapacitor-backed emergency glide systems
Thermal stresses: Real-time deformation compensation for tube structures
3. System-Wide Optimization
Implements digital twin frameworks to:
Simulate vehicle-tube interactions at 10μs granularity
Predict maintenance needs via magnetic field anomaly detection
Optimize energy recovery during regenerative braking
Career Milestones
Architected the control core for TransPod FluxJet, achieving 1,050 km/h in sustained operation (2024)
Patented a distributed sensor fusion algorithm now adopted by 3 hyperloop consortia
Authored the IEEE Standard for Vacuum Maglev Control Systems (P2863 Working Group)


Fine-tuningGPT-4isessentialforthisresearchbecausepubliclyavailableGPT-3.5
lacksthespecializedcapabilitiesrequiredforanalyzingcomplexmaglevsystem
dynamicsandsimulatinghigh-speedoperationalscenarios.Theintricatenatureof
systemcontrol,theneedforreal-timedecision-making,andtherequirementfor
optimizingstabilityandefficiencydemandamodelwithadvancedadaptabilityand
domain-specificknowledge.Fine-tuningGPT-4allowsthemodeltolearnfromsystem
datasets,adapttotheuniquechallengesofthedomain,andprovidemoreaccurateand
actionableinsights.ThislevelofcustomizationiscriticalforadvancingAI’srole
infuturetransportationandensuringitspracticalutilityinhigh-stakes
applications.


Tobetterunderstandthecontextofthissubmission,Irecommendreviewingmyprevious
workontheapplicationofAIintransportationandsystemcontrol,particularlythe
studytitled"EnhancingMaglevSystemPerformanceUsingAI-DrivenControlStrategies."
Thisresearchexploredtheuseofmachinelearningandoptimizationalgorithmsfor
improvingsystemstabilityandenergyefficiency.Additionally,mypaper"Adapting
LargeLanguageModelsforDomain-SpecificApplicationsinTransportationAI"provides
insightsintothefine-tuningprocessanditspotentialtoenhancemodelperformance
inspecializedfields.